欢迎光临~瑞泰新时代(北京)科技有限公司
语言选择:
 ∷
∷

∷
∷
今年4月19日,北京亦庄的一场“人机共跑”马拉松,让很多人第一次直观意识到一个问题:机器人,也会“中暑”。比赛现场,有工程师在路边不断给机器人:手持风扇降温,喷干冰喷雾给关节降温,背部加冰块散热。这一幕看似有点“荒诞”,但却揭示了一个正在被忽视的现实:当算力不断提升,散热正在成为机器人行业的新瓶颈。

2026北京亦庄人形机器人半程马拉松机器人在补给站降温
过去一年,我们接触了大量人形机器人客户。 几乎所有团队都会遇到类似问题:模组性能很好,实验室测试温度可控,但一上整机就开始异常: 降频、发热、稳定性下降。
最终定位原因却很“反直觉”:不是散热器不够强,而是热量排不出去。
大多数散热器,都是这样设计的:
风扇 → 向模组吹风 → 降低芯片温度
这种方式在服务器、PC中没有问题。但在人形机器人中,情况完全不同:冷风进入 , 热风滞留,结果就是:整机内部形成“热循环”。
你会看到一种典型现象:芯片温度正常,腔体温度不断升高,最终系统失稳。
面对这个问题,我们没有继续优化“吹风”。而是重新思考一个问题:散热的本质,是降温,还是排热?
最终,我们做了一个看似简单但本质改变的设计:把风扇方向反过来。
推出:Thor 模块专用有源散热器(反向风扇)RTS-Thor-HS01R
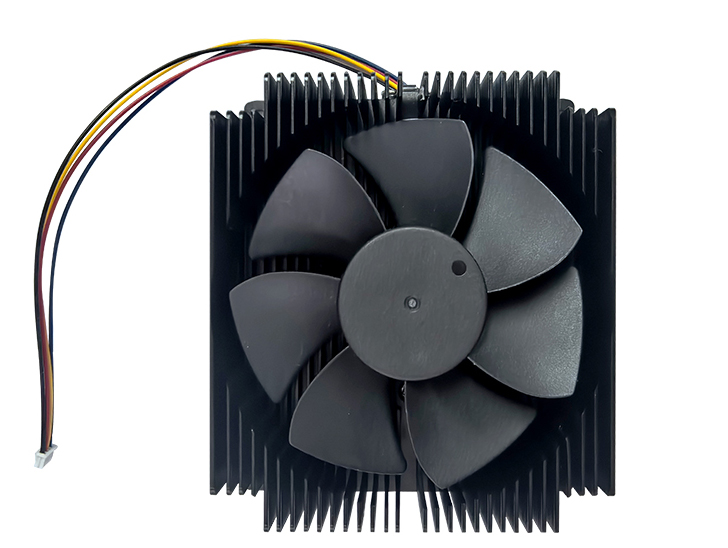
传统方案: 往里吹(Push)
我们的方案:往外抽(Pull / Exhaust)
气流路径变为:
空气 → 穿过鳍片 → 被风扇抽走 → 排出系统
这个改变的意义在于:从“局部降温”,升级为“系统排热”
在人形机器人内部,散热环境具有几个典型特征:
▪ 空间封闭1)解决“热空气排不出去”的问题
抽风结构可以:主动把热空气带出系统,避免热量在腔体内循环累积
2)天然适配整机风道
该散热器不仅服务模组,还可以 作为整机的“排风节点”
3)适应运动场景
不依赖重力方向,气流更稳定, 更适合行走中的机器人
4)降低整机设计复杂度
无需复杂风道,也能实现有效散热
该产品已完成工程化验证:
热阻:0.19 ℃/W
风量:56.73 CFM
转速:0–6000 RPM
功率:18W
噪声:最高 58.8 dBA
材料:AL6063
可稳定支持高算力模组长期运行。
不是一个“散热器”,而是:更稳定的系统能力
1)避免降频与性能波动
温度稳定,算力才能稳定
2)缩短开发周期
无需反复调试风道, 可直接集成使用
3)降低量产风险
避免后期“热问题暴雷”
4)为未来算力升级预留空间
支持更高功耗平台演进
过去: 散热器只是“配件”
现在:散热器正在成为系统能力的一部分
当算力进入人形机器人,散热不再是“吹得更猛”,而是“把热带走”。
如果你正在做:
▪ 人形机器人我们可以提供:
▪ 整机散热架构设计
联系人:Realtimes
服务热线: 400-100-8358
邮箱:info@realtimes.cn
地址: 北京市朝阳区和平西街和平西苑20号B座11层
